«Робот обозначает машину, выполняющую функции разумного существа. В самом звучании этого слова — робот, работать, рабочий, вы мгновенно воспринимаете и смысл, и цель.» (Гибель сенсации, 1935, режиссёр А. Андриевский.) В популярной фильмографии робот — это медиатор, вспомогательный аппарат, помощник или компаньон, а также герой или злодей. Это крайне универсальный концепт «искусственного нечеловеческого», но тем не менее знакомого человеку существа; подход к созданию которых довольно разнообразен.
Почему стоит различать дизайны «гуманоидных» (чаще употребляемое слово андроид) и «негуманоидных» роботов?
Робота привычнее изображать в форме человека, как аппарат, напрямую заменяющий его рабочий функционал. Для подобного всегда существует прямой образец — человек, и значительно сложнее придавать форму тому, чьего аналога в реальности не существует. Образы негуманоидов часто собирают по кусочкам, вдохновляясь механическим движением животных, сложносочинённых фабричных механизмов, или даже детских игрушек.
Даже если персонаж по большей степени антропоморфен, в зависимости от цели, у него будут присутствовать свои уникальные черты; то, что отделяет его от «зловещей долины» более андроид-ориентированных роботов. Это презентует множество новых проблем — как он должен вести себя в окружении? Двигаться? По каким принципам оно действует?
Цель визуального исследования — разобрать, какие технологии использовались при создании изучаемого материала, какой эффект они производят, как выглядит финишный продукт, и есть ли преимущества у того или иного подхода для создания не-человекообразных персонажей.
Для этой цели выбран перечень фильмов в последовательности «возрастания» года создания/года выпуска, чтобы проследить, прямая ли тут представлена эволюция технологий, или всё же она более циклична, чем кажется. Киноленты, соответственно, подобраны по основному критерию исследования.
ОГЛАВЛЕНИЕ
- Вступление
- Истоки; Образцы практических FX Short Circuit RoboCop The Chopping Mall
- Транзишен в CGI The Matrix RoboCop remake Chappie
- Другие примеры Moon Interstellar
- Вывод
Образцы практических FX
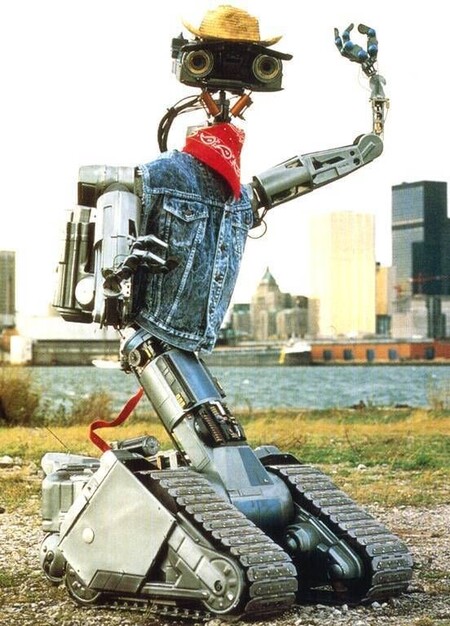
Директор Джон Бэдхем, Номер 5 и Элли Шиди, Allstar/TRISTAR/Sportsphoto Ltd./Allstar
Фильм режиссёра Джона Бэдхэма, на тот момент уже известного по работе над «War Games», или «Военные Игры»; кинолента, которая также затрагивает темы отношения человека и военных механизмов, но в более серьёзном ключе.
«Короткое замыкание» (1986) можно назвать первым фильмом, в котором робот — центральный персонаж.
По словам Бэдхэма из behind-the-scenes DVD-фичуретты, самой затратной частью процесса стала сама конструкция механизма. Был создан концепт робота, который категорически опережал все существующие на момент технологии. Сам дизайн номера 5 создал Сид Мид, при этом его вдохновили технические скетчи Эрика Алларда, который был супервайзером спецэффектов робототехники в фильме.
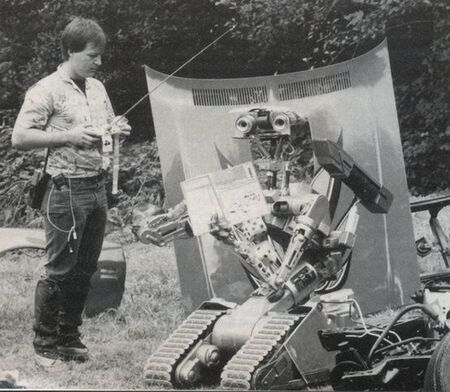
Кадры из behind-the-scenes фичуретты про «Short Circuit», 1986, в кадре детали Джонни 5 и режиссёр Джон Бэдхэм. Супервайзер практических эффектов Эрик Аллард
Механический солдат должен быть достаточно универсальным, преодолевать большие расстояния и труднопроходимые местности. Поэтому робот оснащается танковыми гусеницами. В то же время его верхняя часть должна быть приспособлена для более тонкой работы, и при этом иметь смысл с точки зрения робототехники. Оно должно не выглядеть как человек, но функционировать как он, и этого будет достаточно. Верхняя часть и руки работали при помощи поршней, push-pull которых управлялись внешними пультами, для более точных действий. В запястьях был установлен вращающийся шарнир, который позволял более плавно работать кистью робота. Пальцы, способные действительно поднимать и держать различные мелкие объекты, строились по принципу инверсной кинематики. Одна «корневая» деталь ведет другие, чтобы совершить нужную махинацию.
Детали стачиваются и скругляются, чтобы быть менее узнаваемыми для зрителя. Создаётся иллюзия технологии более совершенной, чем она есть на сете.
Большое внимание уделялось фотоэлементам, в своём смысле это было «лицо» номера 5, которое должно было по-своему проявлять эмоции. По словам директора, в этих нескольких деталях было заключено 90% личности робота. По ходу процесса создания решалось, какой получится его характер, будут ли у него какие-то конкретные черты или манерные действия. Над фотоэлементами были прикреплены створки, как у камер, выполняющие функцию и бровей, и век. Они управлялись кукловодом.
В движение Джонни 5 приводился при помощи телеметрического костюма, носимого на верхней части туловища, который считывал действия кукловода и напрямую транслировал их на машину. Робот в реальном времени озвучивался кукловодом «головы», Тимом Бленни. Это позволяло получить более реалистичную интеракцию между механизмом и остальными актёрами фильма. На некоторых планах использовалась миниатюрная версия номера 5, которую «тянули», чтобы привести в движение. В клоузапах руки робота работают скорее как гигантская марионетка. Они подсоединены к длинным металлическим штырям, что делает их движение чем-то напоминающим «маппетов».
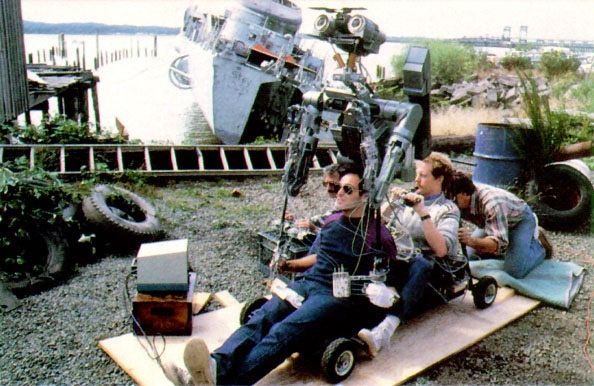
Управление Номером 5, вручную или при помощи радиопульта, «Short Circuit», 1986, реж. Джон Бэдхэм, супервайзер практических эффектов Эрик Аллард
Джонни 5 — настоящая комбинация спецэффектов, оперативной робототехники, а также кукловодства. А самое главное, он действительно является персонабельным героем, которому зритель сопереживает.
Презентация ED-209. «RoboCop», 1987, реж. Пол Верховен
На этот раз затронем создание антагониста фильма «РобоКоп» 1987 года, ED-209 (сам же Робокоп, по сути, является скорее киборгом).
Создание ED-209 было поручено студии Tippett. Была разработана модель боевой установки в полный рост (высотой около 2х метров), командой руководили супервайзеры эффектов Фил Типпет и Крейг Хейс.
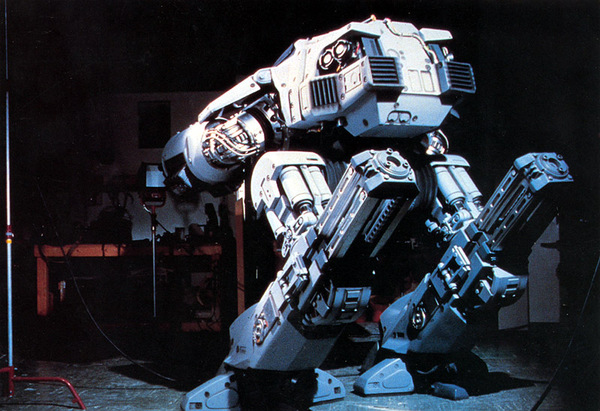
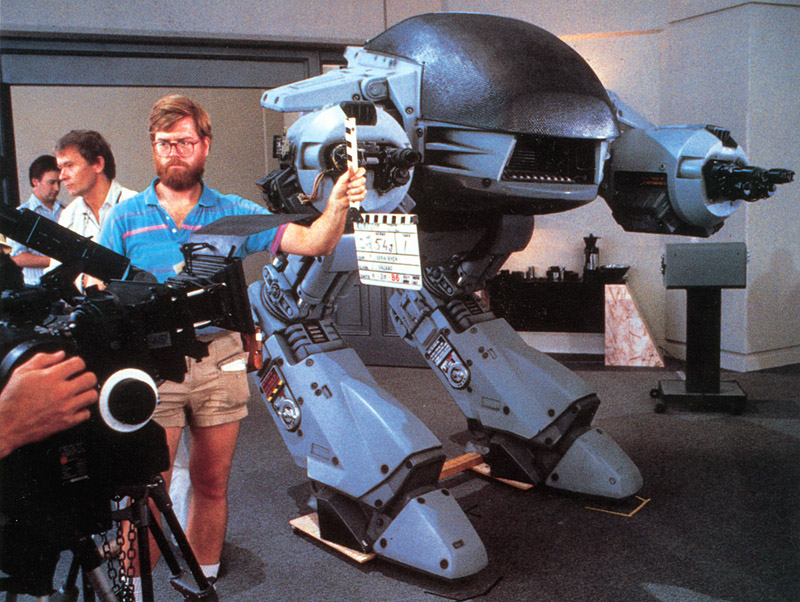
ED-209 во весь рост. Студия Tippett, супервайзеры эффектов Фил Типпет и Крейг Хейс
Режиссёр Пол Верховен сразу заявил, что в облике ED-209 не должно быть ничего «милого». В его представлении это продукт милитаристичного американского дизайна. Оно должно, первее всего, выглядеть инновационно, как дорогая машина, а потом уже команда мастеров спецэффектов разберётся, как это всё воплотить.
Механизм создавался из стекловолотна и пластика, практически без использования металла, чтобы облегчить переноску махины с места на место. В целом, процесс созлания занял около четырёх месяцев. Однако, это была статичная модель, которую использовали для шоукейсов внутри фильма, стоящей рядом с человеком, чтобы задать масштаб механизма, прежде чем переходить к подвижной миниатюрной версии, которая и участвовала в основных стоп-моушен сценах.
Создание миниатюры и полноразмерной версии ED-209. Студия Tippett, супервайзеры эффектов Фил Типпет и Крейг Хейс
Миниатюра (сделанная ранее большей модели) была высотой всего 20 сантиметров, она держалась на легком металлическом каркасе, предоставляющем необходимую подвижность. Сцены с миниатюрой снимались покадрово, и, хоть сам Типпет новаторски снимал в «Go-Motion» (технике, позволяющей создавать реалистичное размытие в движении для стоп-моушена), у фильма не было достаточного бюджета, чтобы позволить подобную технологию.
Чтобы максимально соответствовать динамичному видению Верховена внутри рамок, команда старалась создать максимальное соответствие между двумя разноразмерными моделями робота. В том числе, специально подбиралось освещение, которое будет работать и на полноразмерном сете, и на кукольной миниатюре. Итак, полноразмерная версия ED-209 в фильме снималась в «выключенном» состоянии. Поэтому, для удачного транзишна между моделями в стоп моушн робот всегда должен был переходить из одного состояния в другое. То есть, механизм включается, совершает действие, заканчивает действие и возвращается в статичную позу. Директор часто вмешивался в процесс работы, требуя чтобы результат не смотрелся «дёшево» и не умалял бы драматическую сторону снимаемого контента.
На более современный взгляд, сцены движения роботов имеют ощутимый «мультяшный» характер. С другой стороны, механический персонаж — именно тот, кто может позволить себе подобную неестественную динамику.
Трио Киллботов, дизайнер Роберт Шорт. «Chopping Mall», 1986, реж. Джим Уайнорски
Классический слешер 1986 года, «The Chopping Mall», менее креативно переведённый как «Роботы-убийцы», под режиссёрской работой Джима Уайнорски подарил зрителю на удивление запоминающихся злодеев.
Данный вид «злого робота» далеко не новый по концепту (первые разыгрывались аж в 50-х годах), однако киллботы из фильма всё же отличаются от своих предшественников.
Роберт Шорт, Дон Матсон и Дуглас Тёрнер собирают киллбота. «Chopping Mall», 1986, реж. Джим Уайнорски
Созданием механизмов для фильма занялась команда Роберта Шорта. По его словам, он встретился с Джимом случайно, когда тот искал «кого-то, кто сможет сделать дизайн-концепты трёх метровых роботов, полностью оперируемых при помощи радиоуправления, и в которых невозможно было бы поместиться человеку».
Скетч Шорта был транслирован Майком Новотни, которые сначала изготовили мокапы, в четыре раза меньше оригинала. По ходу решались несколько вопросов конструкции киллботов — треугольная устойчивая база и секция тела дались удачно, а вот с головой пришлось повозиться. В первых итерациях практически не было характерности — это были просто «коробки». В процессе, головы приобрели более геометричную форму, напоминающую голову насекомого. Красный визор-экран добавил дизайну более зловещую ауру.
Сама конструкция роботов описывалась командой как достаточно хаотичная. Был создан полноразмерный каркас из пенопласта, далее были добавлены пластиковые и гипсовые обточенные элементы. Дэвид Вивиан трудился над электроникой, которая наполняла роботов и приводила в движение их элементы. Они использовали самые различные предметы — конвейерные ленты для колёс, движущийся механизм, основанной на моторах для инвалидных колясок, шестерёнки и подвесы из колёс для роликов. Киллботы были экипированы якорями и электрошокерами, для удачной охоты на подростков. В целом, дизайн балансирует между правдоподобным механизмом, и неким мистическим демоном, обрушившимся на ничего не подозревающий торговый центр.
Всего было создано пять роботов, но полный функционал имели только два. Один из них действительно был на радиоуправлении (никнейм: Ремо), а второй, имея те же возможности, управлялся при помощи кабелей с контроль-боксом (названный Рембо). Местами операторам Рембо приходилось прятаться внутри сцены, так как основной кабельный контроллер не мог находиться слишком далеко от робота.
Остальные роботы выступали в качестве «дублёров», в том числе в сценах где они врезаются в окна или взрываются.
Ремо и Рембо под фонтаном крови. «Chopping Mall», 1986, реж. Джим Уайнорски, фото Моргана Дугласа
В кадре киллботы порой намеренно были обрезаны или спрятаны — по словам директора, из-за своего размера они могли быть приняты за игрушку. Он хотел показать, что не смотря на свой масштаб, они могут представлять реальную угрозу, ведь «больше» — не всегда значит «лучше».
Многие шоты сделаны так, чтобы продемонстрировать «реальность» роботов — что они действительно могут автономно двигаться, преодолевать препятствия и преследовать героев, что они не являются марионетками или стоп-моушен куклами.
Актриса Сьюзи Слэйтер убегает от робота. «Chopping Mall», 1986, реж. Джим Уайнорски, фото Моргана Дугласа
В итоге, фильм по праву считается культовым среди фанатов хоррора, спустя десятилетия после его выхода.
Период транзишена, ранний CGI
Крайне важный фильм для истории кино — без сомнения, The Matrix (Матрица) 1999 года, дир. Лана и Лилли Вачовски. Матрица во многом опиралась на микс визуальных и практических эффектов, для фильма создавались инновационные компьютерные технологии, в том числе прославленный bullet time.
Однако, сейчас обратим внимание на большой сюжетный поворот фильма, а именно, машин, которые несут антигеройский характер во франшизе.
Концепты механизмов. Художники Джеф Дэрроу и Стив бёрг. «The Matrix», 1999, реж. сёстры Вачовски
Работа над дизайнами была проделана Джефом Дэрроу, художником-комиксистом. Именно благодаря ему визуал Стражей, капсул и Башен приобрёл уникальный сюрреалистичный характер. Над концептами механизмов также работал Стив Бёрг.
Превизы и анимация машин-инсектоидов. Супервайзер VFX Джон Гаэта, студия MVFX. «The Matrix», 1999, реж. сёстры Вачовски
Машины и их приспособления для содержания людей в целом вдохновлены насекомыми, чтобы максимально отдалить внешние образы от человеческого или даже «млекопитающего» собрата. Робот, следящий за капсулами, сделан похожим на рака отшельника, с корпусом, вылезающим из большой задней части, и раскрывающимся в клешнеподобные манипуляторы. «Лицевая» часть механизма имеет черты личинки стрекозы, с жевалом и крюком, который резко атакует жертву. Его движения достаточно резкие и как будто бы непредсказуемые, что тоже отсылает к насекомому миру.
Это, в целом, враждебные на вид и по характеристикам сущности, которых сложно «прочитать». Они действуют чётко и достаточно слаженно. В визуале роботов из матрицы есть своя неординарная биомеханическая эстетика.
Итоговые шоты. Супервайзер VFX Джон Гаэта, студия MVFX. «The Matrix», 1999, реж. сёстры Вачовски
За компьютерное окружение отвечала калифорнийская студия Manex Visual Effects (MVFX). Это была длинная череда визуализаций и анимаций, как отзывался супервайзер VFX Джон Гаэта, и более года реальной работы ушло на создание и рендер нужной композиции.
По видению Вачовски, это должен быть действительно шокирующий визуал — искусственно выращиваемое человечество и окружающий их неузнаваемый индустриальный комплекс.
Правдоподобию сцены способствует неоднозначное освещение, есть более глубокие черные тени, которые стратегически могут замаскировать или подчеркнуть форму для действующего лица. Механизмы также очерчены ободным светом, создающим чёткий силуэт и не позволяющим чёрному цвету и теням «размыть» действие. В дополнение, реальность имеет холодный голубоватый цвет, что контрастирует с основным упором матрицы на зелёный.
Съёмки «РобоКопа» 2014, реж. Жозе Падилья. Основными VFX занимались студии Framestore, Method Studios и Mr. X
Ребут RoboCop-а 2014-го года (под режиссёрством Жозе Падилья) представил нам новые версии как и именованного героя, так и враждебных ему механических установок.
За основу взяты дизайны из оригинального фильма, с пометкой воспользоваться всем, на что способны последние компьютерные технологии.

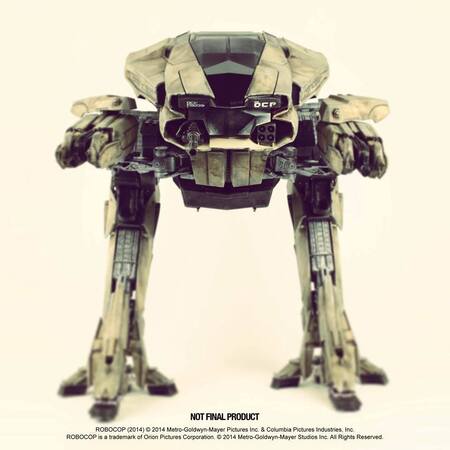
Прототип ED-209, копирайт MGM (2014)
Стоит заметить, что стиль фильммейкера немного конфликтовал с пайплайном VFX, так что им пришлось подстроиться — позволить более свободно двигать камеру и делать длинные тейки. Команда VFX-супервайзора Джеймса И. Прайса остановилась на так называемой «грубой» технике — оставлять в кадре аппаратуру, риги и балки, с учётом, что в пост-обработке всё это будет затираться. Фильм требовал знания работы с дополнением после факта, в том числе над костюмами и дополнением окружения.
На этот раз механическими ED-209 занималась студия Фреймстор, во главе с супервайзером VFX Робом Дунканом. Они не создавались для участия в самом кадре, но для референса размера будущего механизма в кадре были сделаны алюминиевые каркасы на колёсах. Они были передвижными и могли быть оперированы командой на сете. Также для более понятного ориентира на каркас надевался мокап примерно четверти головы 209 (внутренне называемой автомобильной дверью).
В сцене битвы РобоКопа с ED-209 использовался минимум практики со стороны роботов, что соответственно, требовало большей работы со стороны студии. Локацией для битвы стал большой Ванкуверский выставочный комплекс. Для начала, Падилья и Прайс совершили обход комплекса, снимая визуальные ориентиры бля блокинга сцен, в том числе самого директора, отыгрывающего будущее сражение. The Third Floor, в свою очередь создали его пре-виз. Основной целью пре-виза было определить хореографию и характер механизмов.
Пассы анимации и эффектов, брейкдаун от студии Framestore, супервайзер VFX Роб Дункан. «RoboCop» 2014, реж. Жозе Падилья
За основу для движения ED-209 были взяты старые игры про меха-костюмы; и в итоге робот способен на достаточно прямолинейные «тяжеловесные» действия, многие из которых были нарочито упрощены по сравнению с первым пассом анимации (они не должны быть излишне хореографичными, что отличает характеристику 209 от РобоКопа). Хоть боевая установка и анимирована покадрово, её движения значительно более плавные и реалистичные, чем стоп-моушн оригинал, благодаря современным системам риггинга. И, наконец, на размытие в движении бюджета хватило.
Конечно, в процессе битвы разрушать реальный выставочный комплекс не рекомендуется.
Поэтому, в качестве финальных штрихов, со стороны Framestore были обширно добавлены масштабные разрушения, пыль и взрывы. Важно было соблюдать последовательность между шотами — какая именно деструкция произошла и где, чтобы итоговый продукт смотрелся гладко из кадра в кадр.
Финальный шот ED-209 от студии Framestore, супервайзер VFX Роб Дункан. «RoboCop» 2014, реж. Жозе Падилья
Если сравнивать ремейк РобоКоп-а 2014-го года с фильмом 1987; нельзя не отметить ряд преимуществ, напрямую связанной с эволюционирующей технологией создания компьютерных изображений. Итак, в «цифровом ремейке» CG-сцены, выглядят динамично, и при этом не теряется правдоподобие. Действия могут быть гиперболизированными, но благодаря разумно использованной графики не лишены реализма и не вызывают вопросов.
Действительно, возможно создавать качественные аналоги «негуманоидов» в полностью компьютерном формате. Разумно продолжать двигаться и создавать интересные диджитал-дизайны и далее.
Другие примеры
Готовый кадр. «Moon» 2009, реж. Дункан Джонс
Стоит упомянуть также фильм «Moon», или «Луна 2112» 2009 года. Директором кинофильма является Дункан Джонс, и его лента по-своему затрагивает отношения человека и робота. По атмосфере работа чем-то напоминает «Космическую Одиссею» Кубрика, в ней есть и искусственный интеллект, и сюрреалистические элементы, и космическое ощущение одиночества.
Фильм был снят за крайне небольшой срок и с бюджетом всего в 5 млн. долларов. Стечением обстоятельств (которыми стали забастовки сценаристов и остановка крупных проектов), Дункану удалось найти команду для работы над лентой.
Готовый кадр. «Moon» 2009, реж. Дункан Джонс
Work-in-progress практической части фильма. На фото Стив Говарт, супервайзер воркшопа моделей. «Moon» 2009, реж. Дункан Джонс
Многие концепты для фильма были созданы соседом Джонса по комнате, Гэвином Ротни; в том числе, робот Герти. Самым дорогим объектом в создании «Луны» являлась сама база, стоящая около 3,9 млн. долларов. Наличие реальной базы, однако, не позволяло сделать робота в студии. Поэтому, Герти пришлось делать частями: Сначала, была создана полноразмерная модель, под руководством Билла Пирсона и Стива Говарта. Эту модель поставили на колёса и возили по студии, достаточно простое решение, так как у команды не было лишних денег на радиоуправляемые модели. Отдельно были сделаны манипуляторы робота, управляющиеся на месте, вручную, а также сменные «насадки» — в том числе рабочий мини-пылесос.
На станции он и помощник, и собеседник, и в некоторых случаях нянька и подельник. Робот имеет минималистичный «геометрический» дизайн, под стать корпоративно-автоматизированной эстетике фильма, а отличительной его чертой является небольшой экранчик с довольно милыми упрощёнными эмотиконами, вероятно, для большей персонабельности Герти. Актёром озвучки робота был Кевин Спейси, который присоединился к проекту лишь спустя некоторое время, после того как увидел черновой эдит фильма.
Студийный воркшоп с миниатюрами. «Moon» 2009, реж. Дункан Джонс
Мелкие детали и пост-обработка в CG была совершена на студии Cinesite (супервайзер VFX — Саймон Стенли-Клемп). Для фильма также были построены миниатюры лунных роверов и харвестеров. Для многих практических элементов использовались подручные материалы — колёса от игрушек, коробки, обломки пеноплекса и вата. Все технические элементы были крайне лимитированные в своём движении. Главное, они работали, и работали достаточно, чтобы убедительно продать свою составляющую.
Для большей реалистичности фильма был создан характерный «лунный» визуал — поднята контрастность теней и при этом приглушены цвета. Местами фильм выглядит практически чёрно-белым, подстраиваясь под реальные фотографии, полученные с Луны.
Шарлто Копли позирует с моделью Чаппи. «Chappie» 2015, реж. Нил Бломкамп
«Chappie» (2015), или «Робот по Имени Чаппи», является работой режиссёра Нила Бломкампа, ранее известного по «Району 9».
Чаппи, со стороны, чем-то напоминает формат ранее затронутого «робокопа», с тематикой сингулярности (приобретением разумности искусственным существом) и использовании ИИ в военных целях. Конечно, качественным отличием является то, что главный герой — полноценный робот.
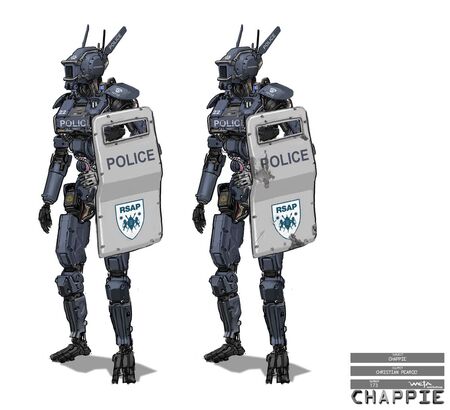
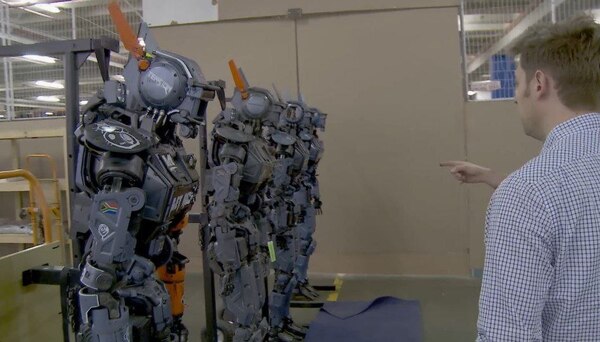
Концепты Кристиана пирса и реальные модели Чаппи на студии Weta Workshop, супервайзер спецэффектов Макс Пулман
Концепт-арт для фильма был выполнен художником Weta Workshop Кристианом Пирсом. Дизайн Чаппи достаточно антропоморфен, являясь из себя роботической заменой полицейского, однако он благополучно избегает эффекта зловещей долины. Его лицо изначально выглядело как обычный LCD-экран, но в последний момент структуру изменили, сделав отдельный визор под «глаза» и оставив створки по краям головы в качестве эмоционирующих бровей. В дизайне присутствуют антенны по краям головы, которые анимируются как «уши» у животных.
За визуал и дизайн отвечали Weta Workshop и Image Engine. Weta конструировали 3д-принты, мокапы и модели роботов, а Image Engine, в свою очередь, выполняли финальные диджитал варианты. В процессе работы, Бломкамп и супервайзер Крис Харви следили за тем, чтобы риггинг персонажей был как можно более реалистичным. Никаких лёгких путей, оно должно полностью работать — даже когда камера скрывает тот или иной участок персонажа. И никаких шариковых шарниров.
Процесс замещения актёра-референса в сцене. Брейкдаун от Image Engine, общий супервайзер Крис Харви. «Chappie» 2015, реж. Нил Бломкамп
В сценах, место Чаппи отыгрывал Шарлто Копли. Однако, в фильме не использовались технологии захвата движения — актёр был подробным референсом для аниматоров. Тайминги его действий переносились один-в-один, настолько важным было присутствие реального отыгрыша — по словам Криса Харви.
На стадии анимации было важно сохранить плавность движения, ведь Чаппи обрёл разумность и стал подражать более пластичным органическим существам. При этом его действия все равно ограничивались «роботичностью», из-за особенности конструкции суставов робота, о которых было упомянуто ранее.
По ходу фильма образ робота меняется. Ему наносится значительный урон, (в том числе потеря руки), он раскрашивается краской, увешивается цепочками. Всё это на самом деле — разные детали от разных роботов, из архива Image Engine. Их можно было свободно менять между собой, и риг автоматически корректировался под нужный уровень урона. Чаппи существовал как единый объект, со множеством вариаций, и все остальные подключались к нему.
Готовый кадр. «Chappie» 2015, реж. Нил Бломкамп
Коллегой по фильму для Скаута Чаппи является Лось, или Moose, более внушительный, но менее универсальный, управляемый боевой робот.
Полноразмерный Лось на студии Weta Workshop, супервайзер спецэффектов Макс Пулман
Weta Workshop также участвовала в создании Лося, а первичную 3д-модель для доработки создал режиссёр Бломкамп. Со временем дизайн перерос из более гладкого в угловатый, танкообразный, покрытый множеством пушек. Однако, команда сохраняла видимость того, что подобный робот, в принципе, реалистично может быть построен и в ближайшем будущем. Лось стал одним из самых больших проектов для WW, со множеством деталей, изготовленных в основном из полиуретана, и укреплённых алюминием, чтобы защитить важные элементы от инцидентов на съёмках.
Эффекты на Лосе. Брейкдаун от Image Engine, общий супервайзер Крис Харви. «Chappie» 2015, реж. Нил Бломкамп
В движении Лось никем не отыгрывался, но для сохранения зрительного контакта использовался старый трюк с теннисным мячиком на палке, который бы держал человек на сете. Анимировался робот также, вручную, однако с учётом совершенно другой конструкции тела машины — а ещё он мог летать.
Лось двигается, как пальцеходящее животное, за счёт оригинального строения ног. При перемещении, правда, он немного заваливается, у него достаточно тяжелая и нагруженная верхняя часть, и это имеет смысл в реальном мире. Робот управляется через инпут человека, поэтому его действия менее «отлаженные», чем у модели автономных Скаутов.
В заключение будет рассмотрен фильм под режиссёрством Кристофера Нолана «Interstellar» — «Интерстеллар», 2014 года.
Концепт был придуман Ноланом в ранней стадии продакшна; Часто робота внешне представляют как аналога человеческой деятельности. Вместо этого был предложен иной концепт «артикулированной машины», какими и были по сути TARS и CASE. Их интеллект и персонабельная характеристика не закреплена на более человекообразных чертах, как мы видели ранее, и существует задуманное разногласие между оболочкой и внутренним составляющим.
Концепты TARS от Ромека Делимата, а также первичные визуализации от Double Negative, супервайзер VFX Пол Фрэнклин
Робот создавался с учётом максимальной утилитарности; Монолит может раскладываться на идентичные по пропорциям маленькие «коробки», благодаря которым механизм может совершать действия разного калибра. Итогом стал минималистичный дизайн, вдохновлённый брутализмом — в нем нет буквально ничего лишнего. Это как если бы механизму дали возможность самому себя построить, и он сделал бы это максимально рационально.


Билл Ирвин учится ходить в роли Тарса. Супервайзер практических эффектов Скотт Фишер. «Interstellar» 2014, реж. Кристофер Нолан
Разработкой физической модели занималась команда по практическим эффектам Скотта Фишера.
Изначально каркасы машин были изготовлены из алюминия, что позволяло артикуляцию и позирование при помощи системы кабелей. Однако, при разработке внешнего материала TARS, была выбрана сталь, что значительно утяжелило конструкцию. На сете 90-киллограмовые марионетки оперировались кукловодами, при помощи системы гидравлики, которая позволяла поднимать и двигать сегменты.
Всего таких роботов было 8, двое из них были полноценными боди-дублёрами основных кукол роботов. А также — модель, прикреплённая к квадроциклу, чтобы создать иллюзию быстрого перемещения. Каждый дублёр мог выполнять собственное действие, например, подъём головы или движение манипулятором. В том числе полноценные «ходячие» роботы. В фильме ходьба механизмов по механике чём-то напоминает походку гориллы, у неё также было несколько вариаций.
Кукловодами TARS и CASE были Билл Ирвин и Марк Фишера соответственно; участники команды отзывались о работе с куклами как одну из самых сложных задач на сьёмках. К тому же, модели оказались капризны к погодным условиям вне студии, металлические коробки сильно ржавели во время киносъёмки снаружи, в особенности после нахождения в воде, и их пришлось перестраивать.
Съёмки робота. Супервайзер практических эффектов Скотт Фишер. «Interstellar» 2014, реж. Кристофер Нолан
Водяное колесо. Студия Double Negative, супервайзер VFX Пол Фрэнклин. «Interstellar» 2014, реж. Кристофер Нолан
VFX-дополняющей частью занималась студия Double Negative (VFX-супервайзер Пол Фрэнклин). CG в основном использовались для совершения действий, которые было бы крайне сложно построить в реальной жизни, а также для «затирания» кукловодов на стадии обработки. Например — самые превалентные водяные сцены, в которых роботы были анимированы вручную, используя физические референсы, созданные на сете. Нужно было, соответственно, убрать тот самый референс и разместить вместо него модель, при этом оставляя реакцию окружения на физический объект внутри сцены (например, водные всплески). Также на компьютере создавались сложносочинённые анимации «раскладывания» механизмов, то есть переход из одной стадии в другую.
Работа в данном случае была точечной, но выполнена в итоге крайне качественно, и прекрасно дополняет физические воплощения роботов.
ВЫВОД
Проанализировав материал вышеперечисленных фильмов, можно сделать вывод, что технический подход к созданию нечеловеческих механизмов так же разношёрстен, как и приводимые к жизни персонажи, нарративно выступающие в ролях и героев, и антагонистов, и помощников. Стоит отметить несколько основных подходов, которые использовались в реализации нужного эффекта.
Первое, это практический вариант. При задействовании продвинутых методов конструкции, порой робо-персонажи для фильмов действительно были настоящими механизмами или как семи-автономными, так и управляемыми роботами. Физический объект внутри сцены безошибочно оказывает влияние на окружающую среду, для этого не нужно ничего просчитывать — в данном случае волей природных законов всё «присутствие» делается, можно сказать, самостоятельно, и не нужно при этом задумываться о том, сколько элементов нужно добавить в пост-обработке.
Большим минусом практики являются банальный лимит физических возможностей той или иной конструкции — для преодоления барьера «физики» часто создаются несколько моделей-дублёров, имеющие специальные запчасти, или вовсе макеты возводятся лишь частично, с расчётом на подвижные миниатюры. Персонажи, созданные практически, имеют однозначную «механичность», при этом позволяя себе креативную неоднозначность в плане дизайнов. Они имеют разнообразный силуэт и размер. Если от робота нужны сострадательные элементы, ему добавляют «мимику» и более людские конечности. Если это антагонист, то он будет лишён антропоморфных черт.
Если получается создать свой стиль и принцип действия для CG-механизма, зритель не будет задаваться излишними вопросами, принимая уловности как должное. Такой стиль может быть основан, например, на жизнедеятельности различных животных — получаются более анималистичные и резкие вариации робототехники.
Правда, далеко не всегда CGI — это лучший вариант для даже качественно сделанный продукт с течением времени может сильно устареть. Искушённому обилием 3д зрителю будет нетрудно уловить проблемы более старой графики.
С другой стороны, в дальнейшем с эрой CG придёт эра более «андроидных» роботов. В фильмах, которые не используют пропы в качестве референса и подменника, основным ориентиром становится человеческий актёр, и каркас движения строится на его действиях. Если конкретная конфигурация робота хорошо покажет себя на большом экране, то она и далее будет кочевать из фильма в фильм, даже от разных франшиз, создавая некоторую «одинаковость».
Более новым подходом, что интересно, является соединение практики и CGI. Нововведения, конечно, присутствуют в обоих вариантах исполнения, и из этого в полной мере можно извлекать выгоду для создания любопытных механических конструкций. Такая комбинация используется в разных пропорциях — это может быть полностью практическое действие с использованием элементов CG для более чистого результата, а также это бывает преимущественно компьютерный персонаж, части которого создаются на студии для более простого взаимодействия с актёрами и окружающей средой, и так далее.
Можно заметить, что присутствует некая «закольцованность» эволюции. Начиналось все с практической конструкции, без возможности генерации изображения на компьютере. С улучшением технологий многие производства кинолент все больше и больше переходили на полностью компьютерные, а с прохождением времени, сейчас как будто бы возвращаются к более физическим воплощениям, но с элементами CGI; даже если создаётся компьютерный персонаж, он существует с ориентиром на реально созданный макет. Получается, на данном этапе разумно сочетать оба варианта как инструменты решения задач, в свою очередь имеющие свои особенности и недостатки.
В дизайнах роботов всегда был некий клэш между желанием сделать персонажа «реалистично механическим» и при этом сложить ощущение, что, да, этот объект действительно может думать и иметь характер. А если у него есть характер, то для экспрессии этого характера стремятся сделать человекоподобную мимику и поведение. Негуманоидные черты более охотно приписываются антагонистичным механизмам, по принципу свой-чужой. Однако, кинофильмы вроде «Interstellar» доказывают, что вполне возможно отойти от данного канона и более свежо подойти к образу сострадательного робота. В целом, не нужно стремиться к излишней антропоморфизации, чтобы создать запоминающегося персонажа.



